1000kv brushless motors.

Calibrating the current sensor for my quadcopter.

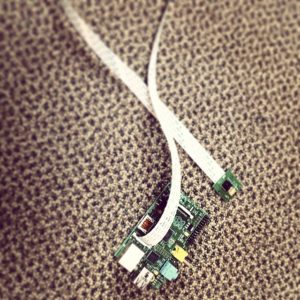
Just received a 75cm CSI ribbon cable for the Raspberry Pi camera
Maiden flight of the quadcopter from yesterday.

Custom vibration damping design for the quadcopter.

It finally happened; broke a carbon fiber tube.

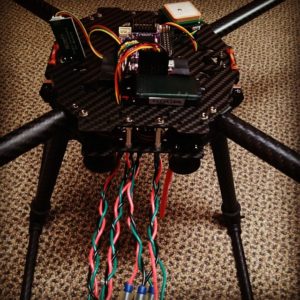
I mounted the ArduFlyer, GPS, 3DRobitics, telemetry, and the RC Receiver on my quadcopter.

I soldered some header pins to a few individually addressable RGB LED strands for my quadcopter.

I braided the wires on my quadcopter to better organize them.